Vector Math Tools MGA-EL
Author: Mathieu Goulet-Aubin & Erwan Leroy - https://github.com/mapoga/nuke-vector-matrix
- http://www.nukepedia.com/toolsets/transform/vector-matrix-toolset
- http://www.nukepedia.com/toolsets/other/vectortools
- https://github.com/mapoga/nuke-vector-matrix
- http://erwanleroy.com/vector-tools-for-nuke-tutorials-and-math/
- http://erwanleroy.com/vector-tools-for-nuke-tutorials-and-math-part2/
Math Tools combines Mathieu Goulet-Aubin & Erwan Leroy's vector tools into 1 main menu.
Introduction
The toolset is separated into 2 categories. One to operate on vectors3 and one to operate on 4x4 transformation matrices. Every pixel can be worked on independently because each can have its own vector and matrix data.
GenerateSTMap
Generates a default ST Map at any resolution. A Format picker lets you set the output resolution, and an Overscan (%) knob (default 10%) expands the map beyond the frame edge — useful when the STMap will be used to drive a lens-distortion workflow where edges need coverage. A Reformat to Overscan toggle bakes the overscan into the output format.
vector3DMathExpression
A NoOp node with built-in expressions that calculates a 3D vector between two points in 3D space and the magnitude (distance) between them. Set Vector 1 and Vector 2 to any two 3D positions — the node outputs v4 = V1 − V2 and Magnitude_v4 = √(v4.x² + v4.y² + v4.z²). Designed to be used alongside Reconcile3D nodes to measure distances or directions in scene space.
Resources to learn about Vectors and Matrices
Most tools in this toolset are mathematical tools and require some basic knowledge about Vectors and Matrices for optimal use.
- https://www.mathsisfun.com/algebra/scalar-vector-matrix.html
- https://en.wikipedia.org/wiki/Transformation_matrix
- http://www.nukepedia.com/written-tutorials/using-the-nukemath-python-module-to-do-vector-and-matrix-operations/
- http://www.nukepedia.com/expressions/enter-the-matrix-knob
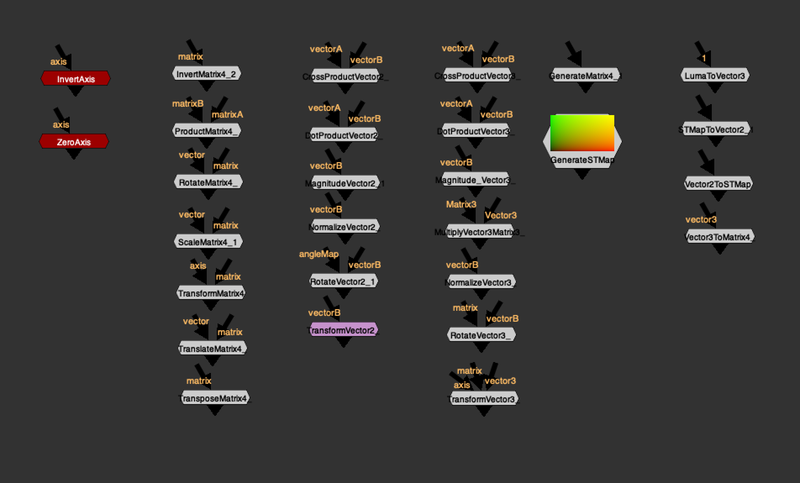
Math > Axis
- InvertAxis — Inverts an input Axis.
- ZeroAxis — Inverts an input Axis at a specified frame.
Math > Matrix4
- InvertMatrix4 — Inverts a pixel-based Matrix4 (defined as layers matrix0, matrix1, matrix2 and matrix3).
- ProductMatrix4 — Multiplies two pixel-based Matrix4 values (defined as layers matrix0, matrix1, matrix2 and matrix3).
- RotateMatrix4 — Applies rotation to a pixel-based Matrix4 (defined as layers matrix0, matrix1, matrix2 and matrix3).
- ScaleMatrix4 — Scales a Matrix4 using a control channel (RGB from vector input), where each channel acts as a scalar for x, y and z.
- TransformMatrix4 — Applies a full transform to a pixel-based Matrix4 (defined as layers matrix0, matrix1, matrix2 and matrix3).
- TranslateMatrix4 — Translates a Matrix4 using a control channel (RGB from vector input), where each channel acts as a scalar for x, y and z.
- TransposeMatrix4 — Transposes a pixel-based Matrix4 (defined as layers matrix0, matrix1, matrix2 and matrix3).
Math > Vector2
- CrossProductVector2 — Calculates the cross product of two Vector2 inputs.
- DotProductVector2 — Calculates the dot product of two Vector2 inputs.
- MagnitudeVector2 — Calculates the magnitude (scalar) of an input Vector2.
- NormalizeVector2 — Normalizes the magnitude of a Vector2 to a length of 1.
- RotateVector2 — Rotates a 2D vector on the same 2D plane.
- TransformVector2 — Transforms an image assuming it is a motion vector in RGBA. Unlike a regular transform, this edits pixel colors to compensate for vector direction and magnitude. Warning: breaks concatenation.
Math > Vector3
- CrossProductVector3 — Calculates the cross product of two Vector3 inputs.
- DotProductVector3 — Calculates the dot product of two Vector3 inputs.
- MagnitudeVector3 — Calculates the magnitude (scalar) of an input Vector3.
- MultiplyVector3Matrix3 — Multiplies (transforms) a Vector3 by a Matrix3 — equivalent to applying Rotation, Scale, and Skew from a Matrix to the vector. A Matrix4 can be used; the last row and column will be ignored.
- NormalizeVector3 — Normalizes the magnitude of a Vector3 to a length of 1.
- RotateVector3 — Rotates a Vector3 in 3 dimensions.
- TransformVector3 — Transforms a Vector3 in 3 dimensions.
Generate
- GenerateMatrix4 — Generates a Matrix4 based on a Matrix knob. Defaults to an identity matrix.
Convert
- LumaToVector3 — Performs a Sobel filter on the luminance channel of an image to extract an approximation of a normal map. For a mathematical conversion of a displacement map to normals, do not use Details separation.
- STMapToVector2 — Transforms a distorted UV map to motion vectors corresponding to the distortion.
- Vector2ToSTMap — Converts motion vectors to a distorted UV map (STMap). The inverse operation of STMapToVector2.
- Vector3ToMatrix4 — Generates a 4×4 transformation matrix from a Vector3 input. Supports three interpretations: Translation (x, y, z values used directly), Rotation (orients a chosen axis toward the vector), or Scale (uniform scale from the vector's magnitude).
Top-level
- Vectors_Direction — Edits the direction of motion vectors.
- Vectors_to_Degrees — Converts vector directions to a value in degrees.